Playing with Servos
|
|
Well, it came time to connect up some servos for steering, and I figured
I better characterize my servos, so I'd have an idea how they react.
|
|
|
|
Holding Jig
I whipped up a jig using some scraps of wood and plastic that I had. I used
one of the servo horns that came with the servo, and my highly sophisticated
coupler consists of a scrap of 1" round aluminum that was drilled to accept
the shaft of the encoder, with a setscrew to hold things in place.
The encoder is a surplus Oak Grigsby one from somewhere. It has 128 pulses
per revolution, or 512 edges when you start to do quadrature on it.
Bigger...
|
|
|
|
|
|
|
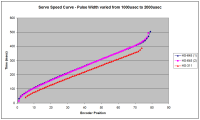
Sweep
The first test I did was to position the servo at the position given
by a 1 millsecond pulse, and then moved it to the position with a 2
millisecond pulse. Recording only the B channel, I recored the time
that each change in encoder position occured and plotted them. I tested 2
Hitec HS-645MG servos and one HS-311 servo.
Bigger...
|
|
|
|
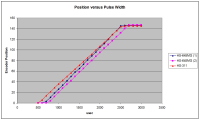
Position
In this test, I set the pulse width to 500 usec, and incremented it by
100 usec, recording the encoder position for each pulse width. It's
interesting to note that the two HS-645's didn't quite move the same amount
and the two extreme positions were at different places. HS-645-1 started to
move before HS-645-2 but stopped sooner.
Bigger...
|
|
Home
- Line Maze 2006
|