| Prev | Sweep |
Next |
|
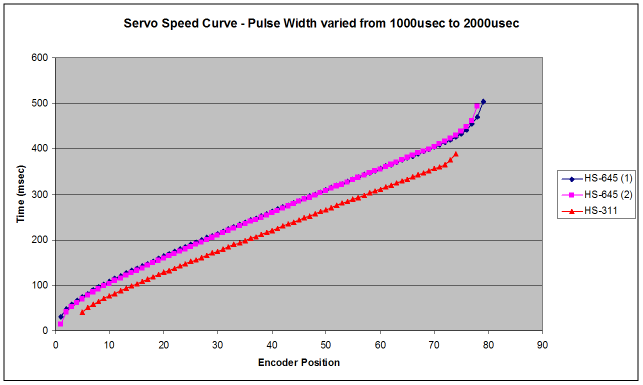
| The first test I did was to position the servo at the position given by a 1 millsecond pulse, and then moved it to the position with a 2 millisecond pulse. Recording only the B channel, I recored the time that each change in encoder position occured and plotted them. I tested 2 Hitec HS-645MG servos and one HS-311 servo. Bigger... |
| Prev | Index | Next |
{kind=link}
Home - Line Maze 2006 - Index