| Prev | Position |
|
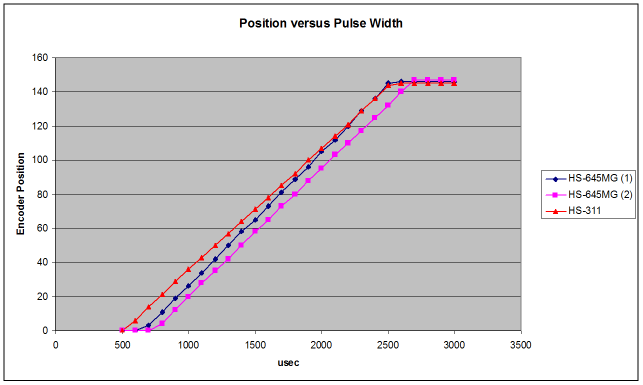
| In this test, I set the pulse width to 500 usec, and incremented it by 100 usec, recording the encoder position for each pulse width. It's interesting to note that the two HS-645's didn't quite move the same amount and the two extreme positions were at different places. HS-645-1 started to move before HS-645-2 but stopped sooner. Bigger... |
| Prev | Index |
{kind=link}
Home - Line Maze 2006 - Index